主持人:莫薩利
系所:電子工程系
精密醫療新突破 手術設備控制技術再進化
為提升外科手術的精準度,莫薩利教授團隊提出一項創新研究,運用非奇異終端滑模控制方法,實現對開顱手術設備的高精度運動控制。該技術不僅助力手術器械穩定性能提升,更為醫療機器人控制技術的應用開創了新方向。
問題的發現與技術突破
解決醫療手術中的控制挑戰
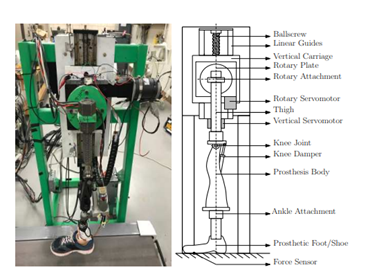
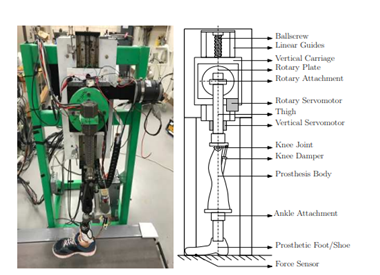
外科手術設備在複雜的手術環境中面臨不確定性、非線性及干擾等挑戰。例如,中耳炎手術中的通氣管塗藥器需要穩定高效地清除中耳液體,開顱手術設備則要求極高的精準度。研究團隊運用擾動觀測器技術,成功解決了這些問題,確保設備在手術中的穩定性與安全性。
控制方法的數學驗證與實驗應用
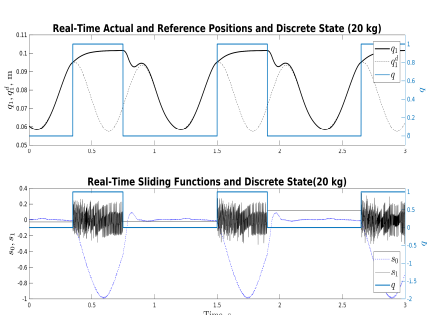
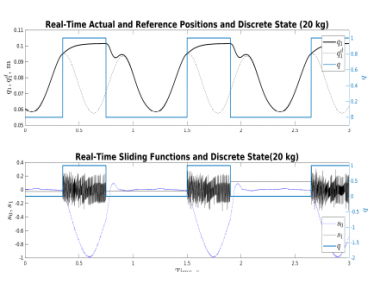
研究中提出的非奇異終端滑模控制方法,結合了快速的運動跟蹤特性與高容錯性。透過數學模型驗證與模擬試驗,研究證實該方法能在各種複雜情境中精確跟蹤設備運動軌跡,並有效應對外部擾動的影響。
研究成果與價值
創新技術的核心貢獻
- 擾動觀測器設計:估算壓電超聲致動器的干擾與不確定性,包括磁滯效應的補償。
- 快速收斂控制器:設計非奇異終端滑模控制器,實現高精度的運動控制,並保證系統穩定性。
- 實際應用突破:改進醫療設備在開顱手術中的操作精度,提升臨床醫療的可行性。
對學生與研究人員的影響
計畫過程中,參與師生深入學習醫療機器人控制系統及動力學模型設計的關鍵知識,從理論到實踐全面提升科研能力。同時,透過與高雄醫院等醫療機構的合作,師生親身參與醫療設備的開發與測試,深化對醫療需求的理解與創新應用的能力。
未來應用與發展方向
拓展控制技術的實際應用
未來研究將進一步優化開顱手術設備,提升其在臨床環境中的應用表現。同時,計畫亦可延伸至其他高精度醫療設備,如微創手術器械及腦神經手術機器人,助力醫療科技產業發展。
強化教育與產業鏈結
研究經驗可融入微學分課程與專題研究中,讓更多學生參與創新技術開發,並深化與醫療產業的合作,促進醫療機器人技術在台灣的發展。
莫薩利教授的研究,不僅推動了手術設備控制技術的創新,也為醫療科技的精密化與智慧化提供了重要參考。這場結合教育、產業與醫療的合作,正為永續健康福祉鋪設堅實基礎。